 ROV: Ethernet Robot Camera & Motors Project
ROV: Ethernet Robot Camera & Motors Project
ROV: Ethernet Robot Camera & Motors Project
ROV: Ethernet Robot Camera & Motors Project
Goal:
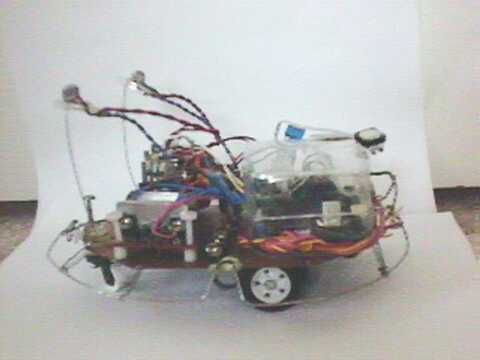
This Project has been designed for building a Robot using the 'SX52 Ethernet Board Starter Kit' as an entry into the SXList embedded ethernet starter contest.
Procedure:
Result:
The Firmware will allow the User to Remote 'Drive' the Robot and view through the Robot Camera on a PC via an Ethernet cable.
Other Possibilities:
Files included :
My_Demo_2-1.src - The Ethernet/Cam/Motors PIC Asm
Cam-Joystk-4.html - The web page to be served by the ethernet demo board.
Sch_Camera_2-1.gif - Schematic of Camera hookup
Sch_Motor_2-3.gif - Schematic of motors hookup
Readme.txt - This Howto file
Author:
John Coleman
jlsilicon@yahoo.com
http://jlc.iwarp.com/jstk_bot/Joystick.html
Fine print (the usual):
I have tested these on my own applications, but No waranty or responsibility is placed upon the author of any of these Design files or problems/errors resulting from them.
Interested:
See also:
{kind=link}
{kind=link}
{kind=link}
{kind=link}