66
www.ubicom.com
IP2022 Data Sheet
5.6.10 GPSI
Hardware
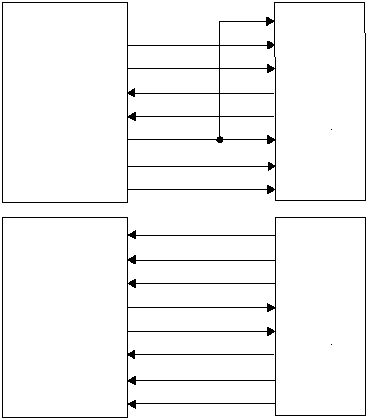
Figure 5-15 shows example circuits to connect the
SERDES in GPSI mode. Table 5-11 shows the GPSI
signal to port pin mapping in Master mode, and Table 5-
12 shows the GPSI signal to port pin mapping in Slave
mode.
Software
GPSI is a general-purpose, point-to-point, full-duplex
serial bus protocol. Only two devices are allowed to exist
on a bus. The GPSI PHY device is responsible for
maintaining bus timing by driving two continuously
running clocks, TxClk and RxClk. The device that does
not drive the clocks is the MAC device. The TxEn and TxD
signals are synchronized to the TxClk clock. The RxD and
RxEn signals are synchronized to the RxClk clock.
The COLLISION and TxBUSY signals do not participate in
actual data transfer on the GPSI bus. The COLLISION
signal is connected to a GPIO port pin, and TxBUSY is
connected to the SxTXME to provide additional flow
control capabilities for the software device driver. The
COLLISION signal is used to indicate that a PHY device
has detected a collision condition. This signal is only
useful when the SERDES is connected to a PHY device
or acting as a PHY device.
The TxBUSY signal is used by a GPSI device to indicate
that the device is currently busy, and that another device
should not attempt to start a data transfer. COLLISION
and TxBUSY are asynchronous to both TxClk and RxClk.
TxBUSY can be configured as either an input or an output
depending which device is slower and has a need to stall
incoming data.
Figure 5-15 GPSI Interface Examples
515-096a.eps
OR
GPSI
Master
SxCLK
IP2022
(GPSI Slave)
SxTXP
RxCLK
RxD
SxRXD
TxD
SxRXP
TxEN
SxTXPE
RxEN
SxTXM
TxCLK
GPIO
COL
SxTXME
TxBUSY
GPSI
Slave
IP2022
(GPSI Master)
SxTXP
RxCLK
TxD
SxRXD
RxD
SxRXP
RxEN
SxTXPE
TxEN
SxTXM
TxCLK
GPIO
COL
SxTXME
TxBUSY
RxCLK
TxD
RxD
RxEN
TxEN
TxCLK
COL
TxBUSY
RxCLK
RxD
TxD
TxEN
RxEN
TxCLK/RxCLK
COL
TxBUSY