IP2022 Data Sheet
www.ubicom.com
71
The SxMODE register must be programmed for a
recovered clock, and the PLL clock multiplier must be
programmed for an appropriate speed. For example, it
can be programmed to be 80 MHz for 8× oversampling.
The received data stream is used, together with the clock
recovery circuit, to recover the original transmit clock and
data.
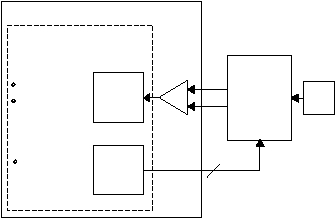
Figure 5-17 Ethernet Interface Example
The SxRXP and SxRXM signals must not be allowed to
float, even if they are not used. These signals must not be
driven low simultaneously.
Software must perform the following functions:
•
Polarity detection and reversal.
•
Carrier sense.
•
Jabber detection.
•
Link integrity test and link pulse generation.
•
Random back off in case of collision.
•
When a collision is detected, sending a 32-bit jam se-
quence. Collisions can be detected by either receiv-
ing an RXXCRS interrupt or by setting the bit count to
7 and then received a RXBF interrupt while transmit-
ting.
•
Formation of Ethernet packet by putting the preamble,
sfd, destination address, source address, length/type,
MAC client data into the transmit buffer. Frame check
computation also must be done in software.
•
MAC layer functions.
GPSI Interface
GPSI is a general-purpose, point-to-point, full-duplex
serial bus protocol. Only two devices are allowed to exist
on a bus. The GPSI master device is responsible for
maintaining bus timing by driving two continuously
running clocks, TxClk and RxClk. The device that does
not drive the clocks is the slave device. The TxEn and TxD
signals are synchronized to the TxClk clock. The RxD and
RxEn signals are synchronized to the RxClk clock. The
mapping of GPSI signals to SERDES signals is shown in
Table 5-11.
COLLISION is connected to a general-purpose port pin,
and TxBUSY is connected to the SxTXME to provide
additional flow control capabilities for the software device
driver. The COLLISION signal is used to indicate that a
PHY device has detected a collision condition. This signal
is only useful when the SERDES is connected to a PHY
device or acting as a PHY device.
The TxBUSY signal is used by a GPSI device to indicate
that the device is currently busy, and that another device
should not attempt to start a data transfer. COLLISION
and TxBUSY are asynchronous to both TxClk and RxClk.
TxBUSY can be configured as either an input or an output
depending which device is slower and has a need to stall
incoming data.
Clock recovery
Analog
Components
Magnetics
515-064.eps
Tx
Rx+
Rx-
Manchester
decoding
coding
Serializer/Deserializer
+
-
RJ45
Data
Endoder
Data
Decoder
Manchester
IP2022
Table 5-11 GPSI Interface Signal Usage
GPSI
Signal
Name
SERDES
Signal
Name
Direc-
tion
Description
TxClk
SxTXM
I/O
Transmit clock
TxD
SxTXP
Output
Transmit data
TxEn
SxTXPE
Output
Transmit data valid
RxClk
SxCLK
I/O
Receive clock
RxD
SxRXD
Input
Receive data
RxEn
SxRXP
Input
Receive data valid
COLLSION GPIO
I/O
Indicates a collision
at PHY layer (han-
dled by software)
TxBUSY
SxTxME
I/O
Indicates a data
transfer in progress
(handled by soft-
ware)