Like your arm, but on a robot. It might not be shaped like your arm. There
are a lot of types.
Types:
-
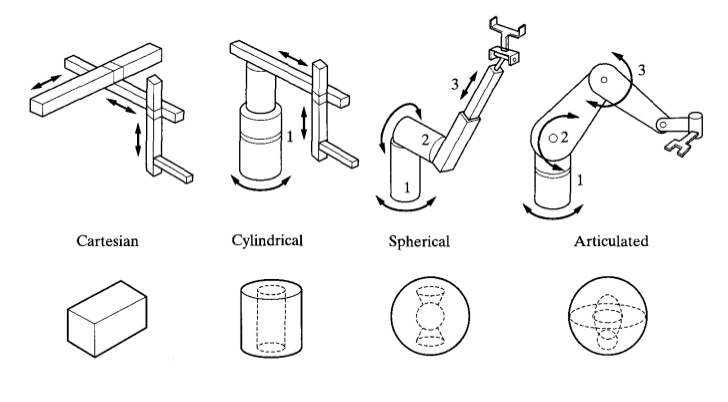
Anthropomorphic (aka Articulated): Shaped like your arm and
with a human looking hand. Typically mounted upside down, with the base (would
be your shoulder) on the bottom, and the elbow sticking up into the air.
The MeArm is one example but these are common and what you probably think
of first. e.g Dexter
-
Spherical / Polar. With a base that rotates, and an slide that
can be angled up or down, and in or out. It moves by changing Azumuth (rotate
the base), Declination (angle the slide higher or lower), and Range (slide
in or out from the base).
-
Cartesian / Gantry: With slides and axis that move in 3 dimensions:
X, Y, and Z. Commonly found in 3D printers
and CNC machines. These are the easiest to
control, and probably the most common.
-
Cylindrical: With a central pole that it moves up and down upon, and
rotates around, and then a slide that reaches in or out from there. It's
dimensions are Height, Azumuth, and Range.
-
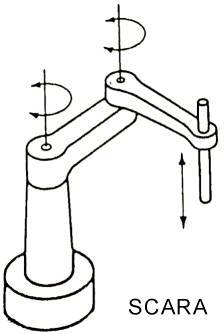 SCARA
(Selective Compliance Articulated Robot Arm.) robot: Like a cylindrical robot,
but instead of a slide, it has an elbow joint going out to the side. Put
the top of an articulated arm, turned on its side, on a cylindrical base.
They sometimes have two elbow joints, one left, one right, connected together
at the end. These are becoming very popular.
SCARA
(Selective Compliance Articulated Robot Arm.) robot: Like a cylindrical robot,
but instead of a slide, it has an elbow joint going out to the side. Put
the top of an articulated arm, turned on its side, on a cylindrical base.
They sometimes have two elbow joints, one left, one right, connected together
at the end. These are becoming very popular.
-
Delta: 3 actuators of some form (usually slides, sometimes levers)
move three rods which meet together at the end. By moving each of the rods
up or down, the point where they meet can be changed. Seen in some 3D printers.
The rods can be replaced with cables in a Wirebot.
Terminology:
-
End effector
-
Like your hand. With metal fingers, pinchers, gripper, vacuum, or many other
things that can effect the world.
-
Kinematics
-
How it moves. Believe it or not, this gets really really complex.
Actuators,
Motors
See also: